📖 个人简介
你好👋!我是郝博文,一名来自江苏省苏州市的大三学生,就读于 重庆大学 国家卓越工程师学院 2023级明月科创实验班,中共预备党员,重庆大学三好学生,学年综合测评成绩排名年级第二,总平均成绩87.25581分,GPA3.57;两年累计获国家级奖励6项、省市级9项、校级13项,获1次甲等综合奖学金与2次乙等综合奖学金;目前担任国家卓越工程师学院科协副主席与24级明月科创实验班《人因工效学》《机器人基础》课程助教。
入学以来,累计志愿时长达到202个小时,积极参与科技创新与社会实践,在大学生创新创业项目中带领团队获得国家级优秀结项,担任过四门课程的学生助教,参与过两段暑期社会实践,并曾在深圳科创学院、明月湖科创产业基地、Xbotics具身智能社区中有过三段实习,学习成绩与工作能力兼优。
目前我在重庆大学具身智能实验室研究冗余机械臂运动学与深度强化学习;我担任核心成员的 畅跑呼吸团队 已通过 明月湖国际智能产业科创基地 的10万元阶段立项;我获得了国家公派留学资格与资助资格,将于2026年9月前往 新加坡科技设计大学 参与一学期的交换学习 [国家公派出国留学证明] [学习计划]。
我的个人技能包括:
- 机械建模(Fusion360,Solidworks,加工装配等)
- PCB设计(立创EDA,元器件选型,焊接与测试等)
- 嵌入式开发(Keilv5+STM32CubeMX,标准库与HAL库)
- ROS(Rviz,Gazebo,Mojoco)
- 物理与机械仿真(Matlab,ADMAS,Unity)
- 大模型部署与微调(场景适配与模型调用)
- UI界面与小程序制作(Matlab,微信)
- 网页开发与制作(HTML,CSS,JavaScript)
- 视频剪辑(剪映,Photoshop)
我的语言包括:
- 大学生英语四级/六级
- 雅思(备考中,预计2026年4月考试)
- C、Python、C++、Matlab、C#
🎓 主修课程
- 自动控制原理、微电路设计、人因工效学、数理综合、线性代数、概率论与数理统计、工程原理、工程设计、定量工程设计方法、机器人基础、自然与设计、产品设计、程序设计、个性化实践
个性化实践:
- 大三上学期(2025.9~2026.2) [报告] [答辩]
- 大二下学期(2025.2~2025.6) [报告] [答辩]
- 大二上学期(2024.9~2025.1) [报告] [答辩]
- 大一下学期(2024.2~2024.6) [报告] [答辩]
🏅 荣誉奖项
竞赛类
- 2025.10 获得 2025年中国机器人大赛ROBOCUP农业灌溉组全国赛
国家一等奖 - 2024.02 获得 2024年全国大学生机器人大赛ROBOCON
国家三等奖 - 2025.10 获得 2025年中国机器人大赛ROBOCUP旅游寻宝组全国赛
国家三等奖 - 2025.10 获得 2025年中国机器人大赛ROBOCUP旅游探险组全国赛
国家三等奖 - 2025.03 获得 2025年Robomaster机甲大师机器人竞技赛西南赛区
国家一等奖 - 2025.03 获得 2025年Robomaster机甲大师联盟赛3V3对抗赛
省三等奖 - 2025.07 获得 2025中国机器人大赛重庆区域赛农业灌溉组
省冠军 - 2025.07 获得 2025中国机器人大赛重庆区域赛旅游探险组
省冠军 - 2025.07 获得 2025中国机器人大赛重庆区域赛旅游寻宝组
省冠军 - 2025.08 获得 2025“TI杯”全国大学生电子设计竞赛重庆赛区
省一等奖 - 2025.01 获得 2025年美国大学生数学建模大赛
Meritorious Winner - 2024.11 获得 2024年重庆市大学生工程实践与创新能力大赛智能救援
省二等奖 - 2025.08 获得 2025年中国机器人大赛专项赛无人机挑战赛
省三等奖 - 2024.11 获得 2024年重庆市大学生创新方法(TRIZ)大赛
省三等奖 - 2024.11 获得 2024年中国大学生信息素养大赛重庆赛区
省优胜奖 - 2024.10 获得 2024年重庆大学VEX机器人竞技比赛
校级一等奖 - 2024.11 获得 2024年重庆大学物理学术竞赛(CUPT)
校级一等奖 - 2025.05 获得 2025年重庆大学智能车竞赛缩微电磁组
校级二等奖 - …
学生工作类
- 2025.11 获得 重庆大学
三好学生 - 2025.07 获得 重庆大学
卓越助教奖 - 2025.03 获得 重庆大学优秀学生综合素质测评
乙等奖学金 - 2025.09 获得 重庆大学优秀学生综合素质测评
乙等奖学金 - 2026.03 获得 重庆大学优秀学生综合素质测评
甲等奖学金 - …
其它
- 2026.01 获得 重庆大学2025年第二批大学生创业训练项目
国家级优秀结项 - 2024.06 获得 大学生科研训练计划(SRTP)
良好结项 - 2025.07 获得 深圳科创学院
明星助教 - 2024.01 获得 宁波XPotPark智能研究院冬令营
优秀营员 - …
📝 论文专利
论文
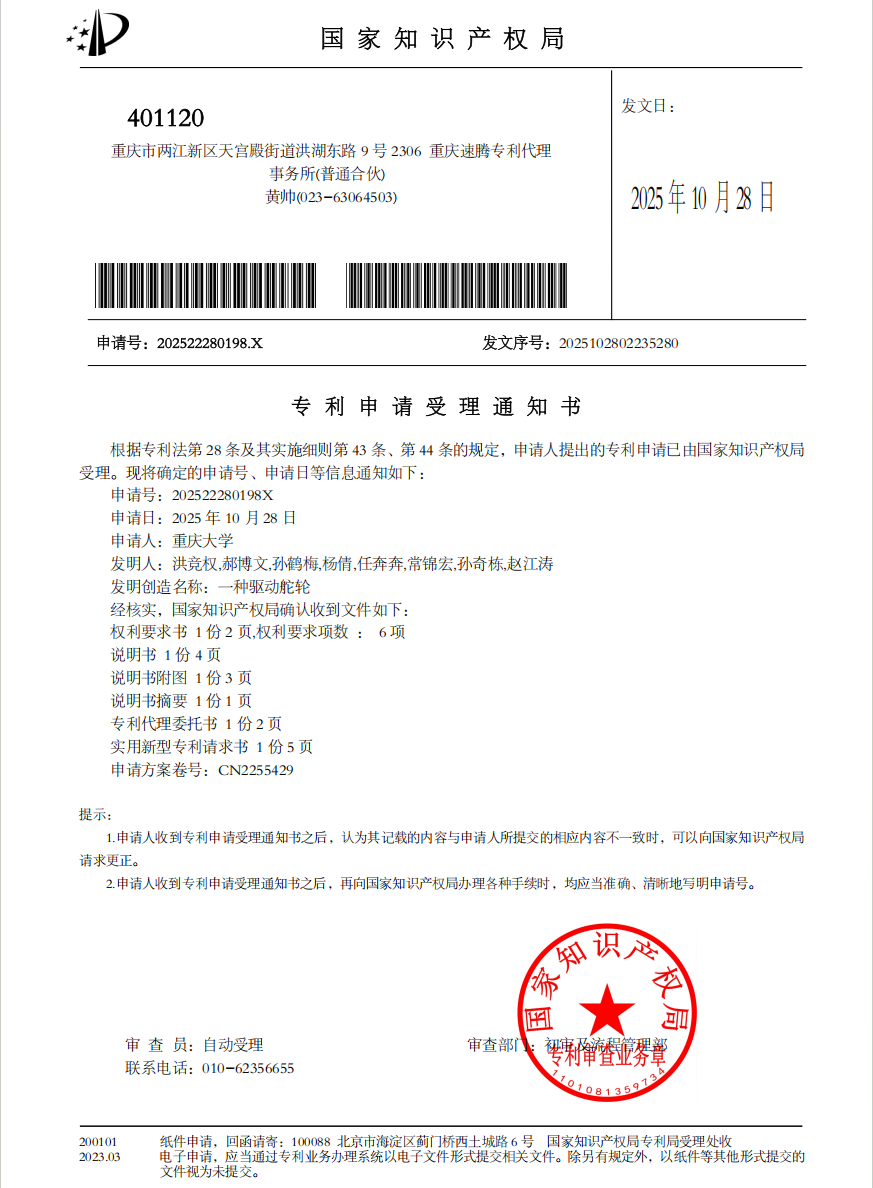
专利
💻 工作实习
- 2025.09.01 - 2025.12.01, Xbotics具身智能社区, 杭州 [实习证明] [社区官网]
- 2025.07.01 - 2025.07.30, 深圳科创学院, 深圳 [实习证明]
- 2024.10.01 - 2025.01.20, 重庆晨之越科技有限公司(明月湖国际智能产业基地), 重庆 [实习证明] [产品介绍] [产品链接]
![[实习证明]](recources/practise/XBotics%e5%ae%9e%e4%b9%a0%e8%af%81%e6%98%8e.jpg){kind=link}
💡 项目经历
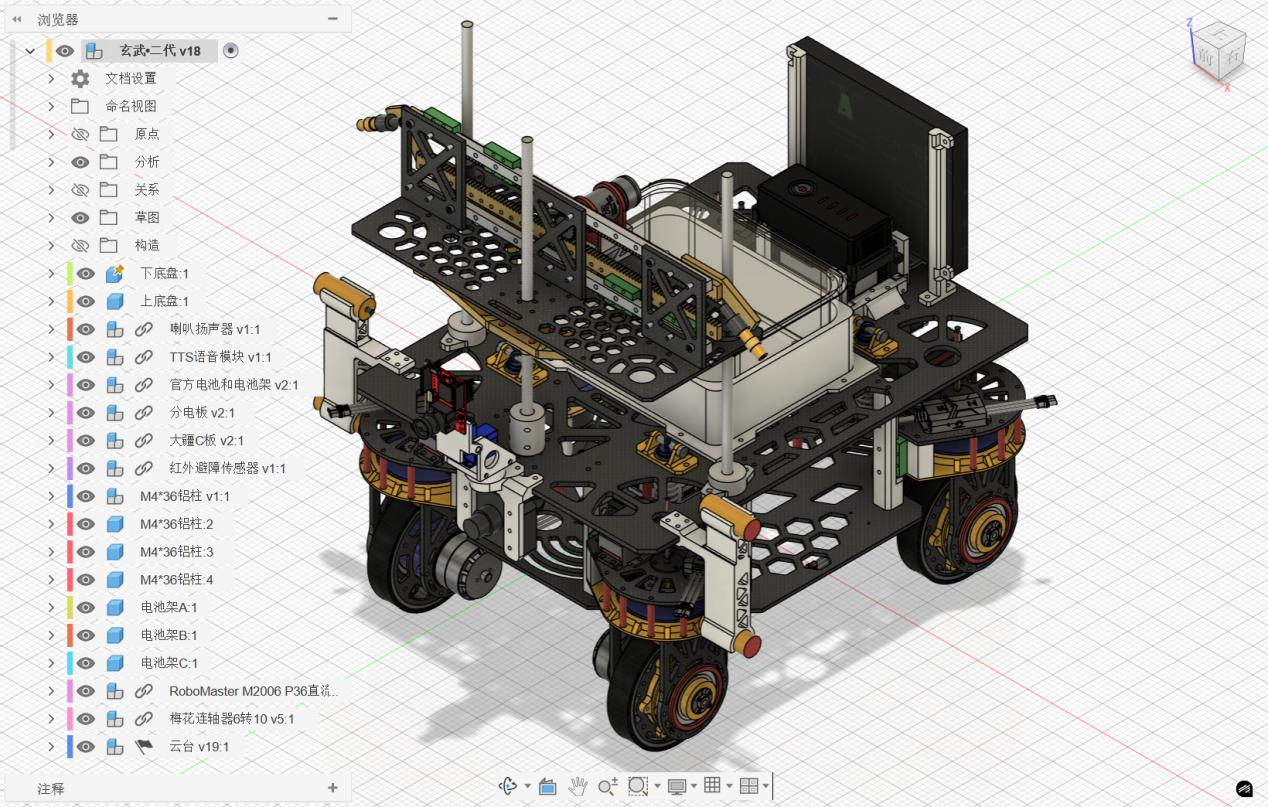
🤖 中国机器人大赛农业组 - 农业灌溉机器人
项目简介:具备自主导航系统与精准灌溉结构的农业机器人系统
主要职责:
- 机械设计:独立开发舵轮底盘农业机器人的机械结构设计与 3D 建模
- 传动机构:采用丝杆云台、齿轮齿条等机构实现喷头三自由度伸展
- 控制系统:集成视觉传感器、显示屏、语音模块等,实现精准灌溉与信息播报
项目成果:
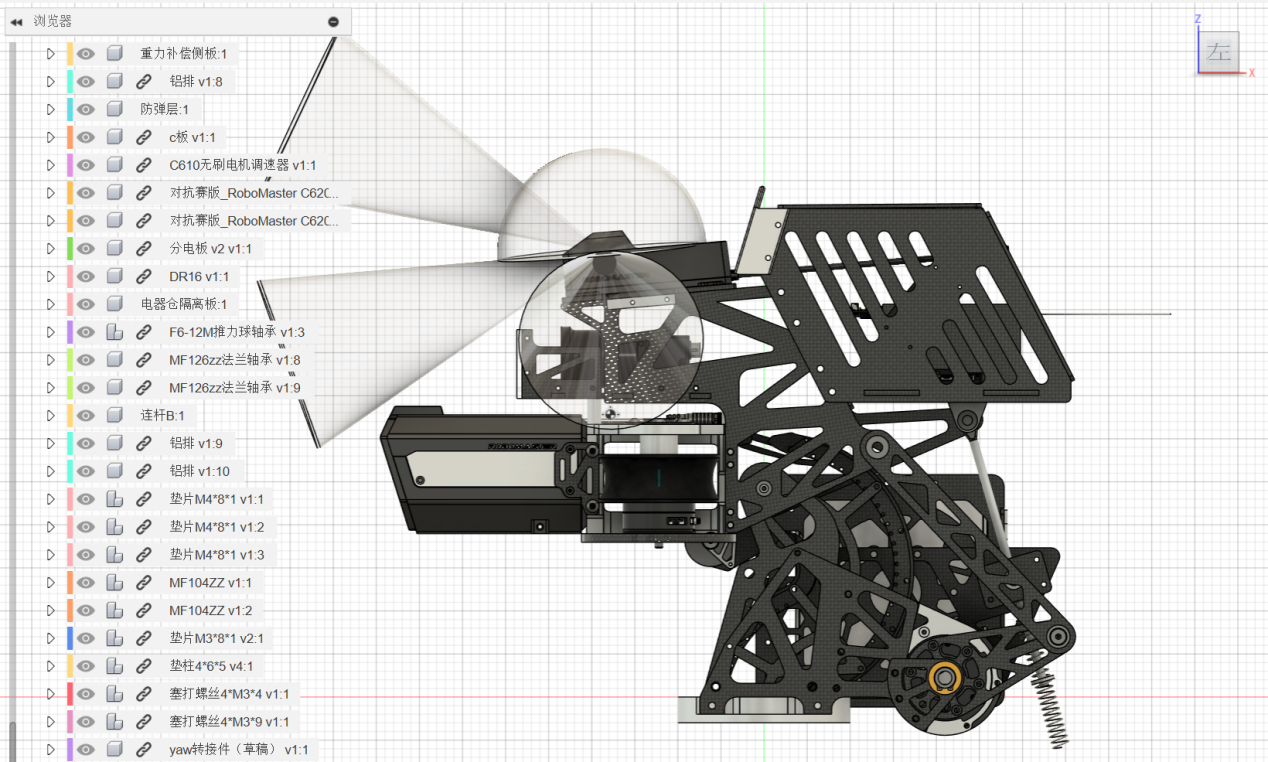
🤖 重庆大学Robomaster千里战队 - 英雄机器人结构设计
项目简介:作为英雄组负责人设计了25赛季英雄机器人底盘、云台与测试弹舱
主要职责:
- 测试框架:为步兵机器人发射机构设计了同步带Yaw轴、弹舱与测试框架
- 英雄底盘:设计了满足25赛季爬坡与上台阶需求的英雄机器人底盘
- 连杆云台:为25赛季英雄机器人设计了连杆云台,Yaw轴与Pitch轴
项目成果:
- 2025.03 获得 2025年Robomaster机甲大师机器人竞技赛西南赛区
一等奖[获奖证书] - 2025.03 获得 2025年Robomaster机甲大师联盟赛3V3对抗赛
三等奖[获奖证书]
![[获奖证书]](recources/project/RM/RMUL+2025%e6%9c%ba%e5%99%a8%e4%ba%ba%e7%ab%9e%e6%8a%80%e5%a5%96-3V3%e5%af%b9%e6%8a%97%e8%b5%9b_631.png){kind=link}
相关资料: [撑杆履带向底盘] [联盟赛英雄云台] [2.5摩擦英雄底盘优化]
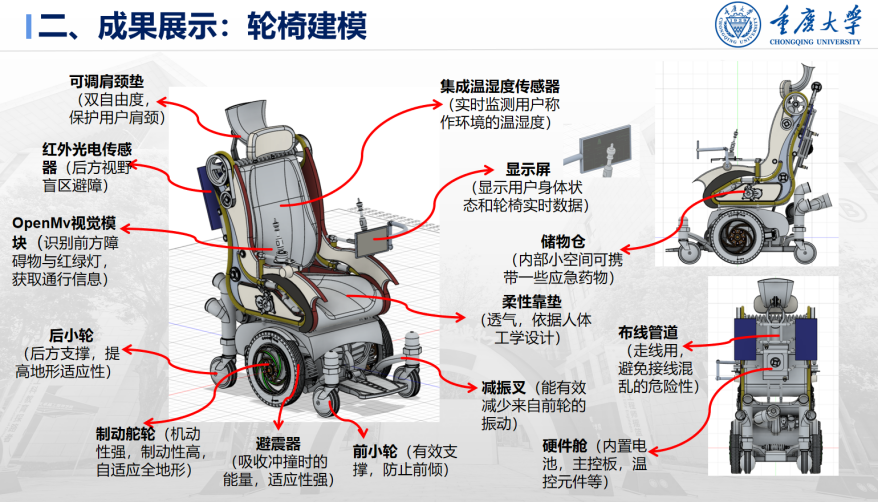
🦼 国家(市)级大学生创业训练项目 - 多模态智能轮椅机器人
项目简介:一款同时具备环境感知能力与健康监测系统的轮椅机器人
主要职责:
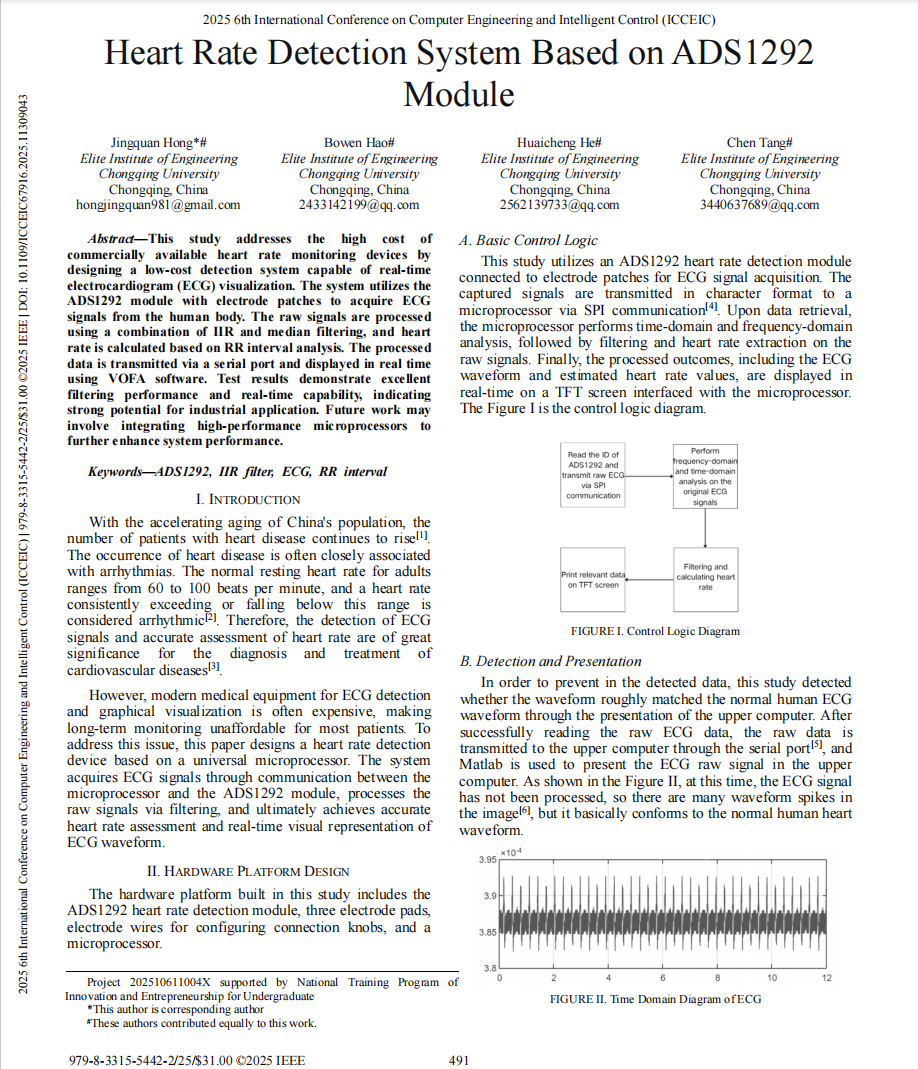
- 嵌入式开发:使用正点原子探索者与ADS1292模块设计了用户心电监测系统
- 视觉监测系统:集成OpenMV视觉模块与DY_SV8F语音模块等设计了环境监测与播报系统
- 机械设计:独立完成了轮椅机器人的整体机械结构与局部模块的设计与建模
项目成果:
![[证书]](recources/project/wheelchair/certificate.jpg){kind=link}
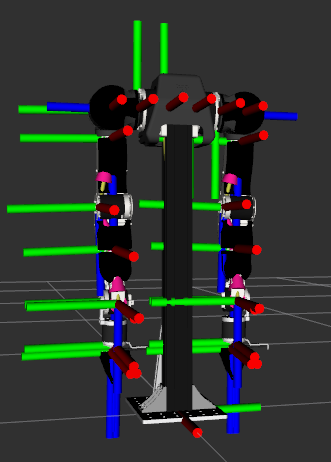
🦾 重庆大学具身智能实验室 - 七自由度机械臂运动学
项目简介:基于OpenArm机械臂的运动学解算与轨迹规划
主要职责:
- 运动学算法:提纯与重构KDL机械臂运动学库,拆解与优化核心算法
- 硬件在环仿真:使用独立开发的运动学库实现STM32直接控制Rviz虚拟机械臂
-
运动学库性能测试:
①Matlab拟合机械臂末端的目标轨迹与真实轨迹从而验证运动学解算精度
②STM32F407内置定时器记录机械臂单次解算时间从而得出计算效率
项目成果:
- 实验室项目(推进中)
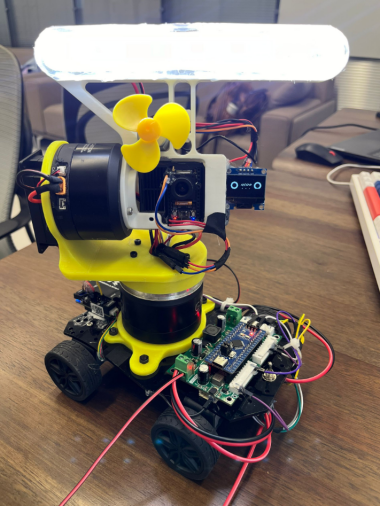
🛋️ 自动控制原理 - 多模态台灯小桌宠
项目简介:集成视觉、听觉、情绪交互的多功能台灯桌宠
主要职责:
- 嵌入式开发:语音、视觉模块与桌宠表情的状态机程序编写;灯带闭环PID控制算法
- 视觉功能开发:使用Maixcam进行自学习跟随、手势识别、情绪识别的开发与应用
- 机械设计:独立设计了基于大疆GM6020云台电机的双自由度云台与整机建模
项目成果:
- 获得 2025“TI杯”全国大学生电子设计竞赛重庆赛区
一等奖[获奖证书]
![[获奖证书]](recources/project/lamp/%e7%94%b5%e8%b5%9b%e8%af%81%e4%b9%a6.jpg){kind=link}
🚗 大学生工程实践与创新能力大赛 - 智能救援机器人
项目简介:在多个规则限制下设计的具有自动/手动双模式的智能救援机器人小车
主要职责:
- 机械设计:历经四次迭代,设计出二轮差速/三全向轮/四全向轮底盘与夹爪结构
- 视觉算法:基于Maixcam视觉传感器完成对目标救援物的识别与跟随算法开发
- 海报制作:使用PS完成海报的设计与制作
项目成果:
![[海报]](recources/project/engineer/%e6%99%ba%e8%83%bd%e6%95%91%e6%8f%b4%e6%b5%b7%e6%8a%a5.jpg){kind=link}

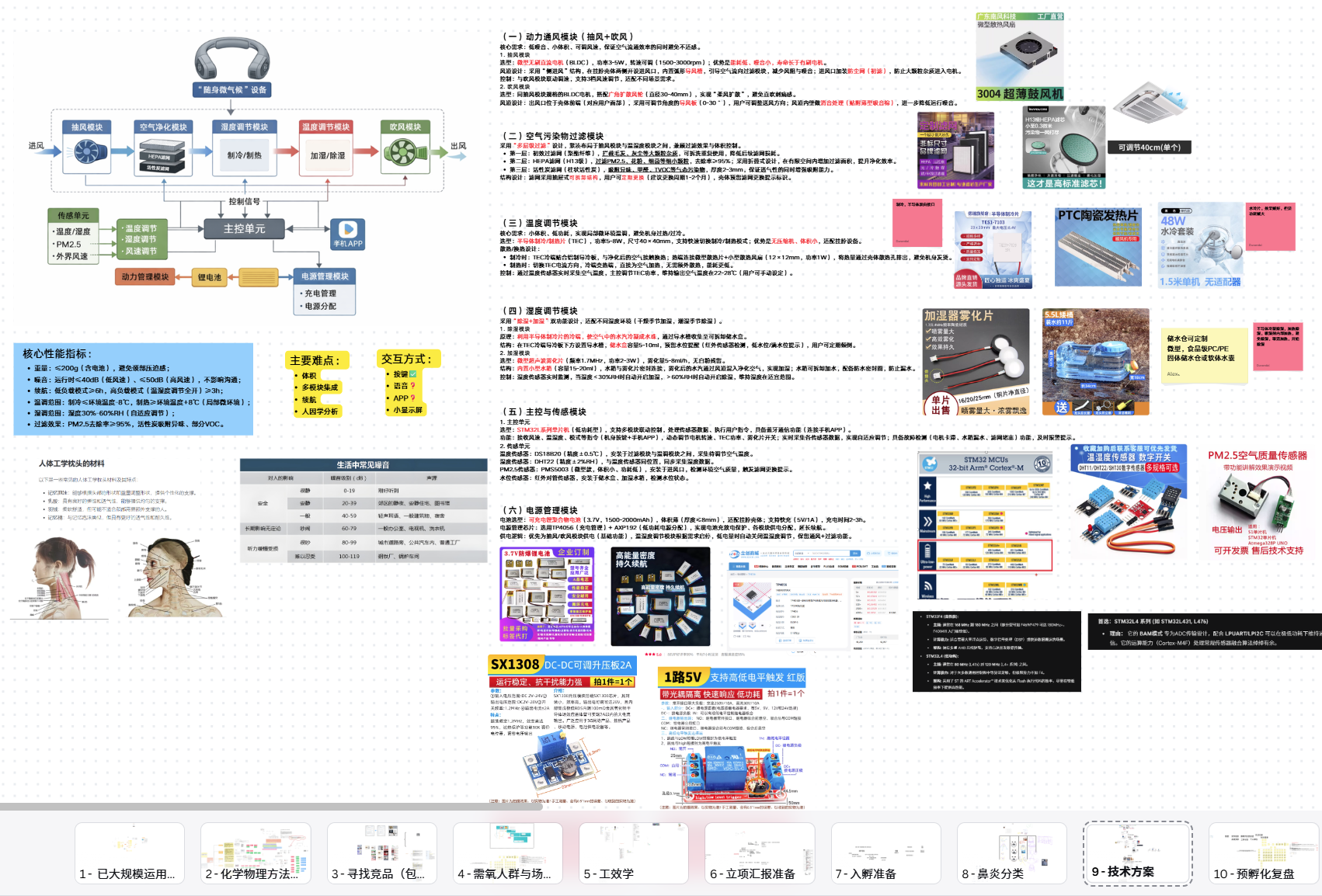
🎯 “畅跑呼吸”团队项目 - 明月湖科创基地创业项目
项目简介:作为核心成员开发的针对跑步爱好者的一款具有自动调节空气状况的硬件设备
主要职责:
- 市场调研:通过广泛桌面调研与用户访谈寻找痛点,建立用户画像
- 样机制作:为原理样机确定技术路线,进行元器件的选型与PCB绘制
- 大模型开发:为样机部署本地化轻量级大模型从而实现环境感知与数据理解
项目成果:
- 团队已通过 明月湖科创基地 的10万元阶段立项,目前处于50万元探索期阶段
🎯 宁波XPotPark智能研究院冬令营 - 产品设计项目
项目简介:作为核心成员开发的一款口含式电动超声波牙刷
主要职责:
- 市场调研与项目答辩
- 产品设计与 3D 建模,样机制作与迭代
- 调研报告撰写、PPT 制作、答辩演讲
- 视频剪辑、海报设计
项目成果:
- 获得 2024年宁波XPotPark智能研究院冬令营
优秀营员[证书]
![[证书]](recources/project/toothbrush/%e5%ae%81%e6%b3%a2%e5%86%ac%e4%bb%a4%e8%90%a5%e8%af%81%e4%b9%a6.jpg){kind=link}
![[展板]](recources/project/toothbrush/%e5%b1%95%e6%9d%bf.jpg){kind=link}

⚙️ 扫地机器人重制与升级 - 微电路设计 课程项目
项目简介:基于海尔TL30UI进行整体重制与功能扩展实现的一款具有自主扫图与路径规划的多功能扫地机器人
主要职责:
- 元器件选型:基于扫地机器人的功能需求进行元器件与传感器的选型测试
- 电路设计:使用嘉立创EDA对机器人进行电路板的原理图设计与PCB绘制
- 导航算法:使用 N10 雷达搭配树莓派5实现扫地机器人的全局扫图与路径规划

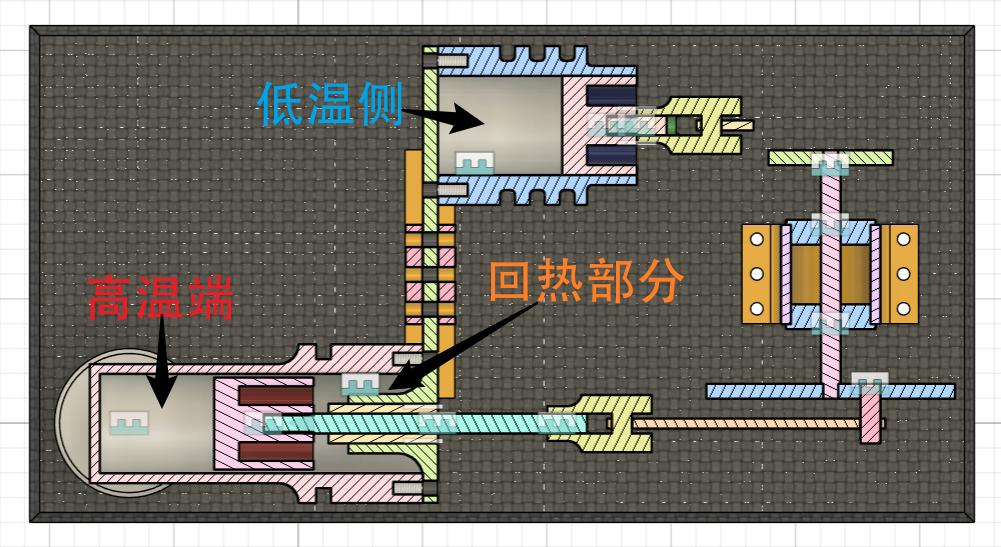
⚙️ 斯特林发动机设计与制造 - 工程设计 课程项目
项目简介:从0到1实现的γ型斯特林发动机的完整设计与仿真
主要职责:
- 结构设计:负责机械结构设计、制作及加工,完成物理样机
- 热力学分析:对气缸内气体的斯特林循环进行定量分析,迭代调整设计参数
- 联合仿真:使用 Adams 与 Matlab Simulink 进行联合仿真,分析理论输出功率