📖 About Me
Hello 👋! I am Hao Bowen, a junior student from Suzhou, Jiangsu Province, studying at Chongqing University’s National Elite Institute of Engineering, Class 2023 Mingyue Innovation & Technology Experimental Class, a probationary member of the CCP, and Merit Student of Chongqing University. My comprehensive evaluation ranking is 2nd in grade with a total GPA of 3.57 (87.26/100); I have received 6 national-level awards, 9 provincial-level awards, and 13 school-level awards in two years, and won First-Class Comprehensive Scholarship once and the Second-Class Comprehensive Scholarship twice. Currently serving as Vice Chairman of the Science and Technology Association of the National Elite Institute of Engineering and a teaching assistant for the “Human Factors Engineering” and “Fundamentals of Robotics” courses for the 2024-level Mingyue Innovation Lab.
Since enrollment, I have accumulated 202 hours of volunteer service, actively participated in technological innovation and social practice. I led teams to receive national-level excellent project completion in undergraduate innovation and entrepreneurship projects, served as a student teaching assistant for four courses, participated in two summer social practices and three internships. I have interned at Shenzhen Innovation Academy, Mingyuehu Innovation and Industrial Base, and Xbotics Embodied Intelligence Community. I excel in both academic performance and work ability.
Currently researching redundant robotic arm kinematics and Deep Reinforcement Learning at Chongqing University’s Embodied Intelligence Laboratory. The “Chanpao Breathing” team, which I am a core member of, has passed the RMB 100,000 staged funding approval from Mingyuehu International Smart Industrial Innovation Base. I will participate in one semester of exchange learning at Singapore University of Technology and Design starting in September 2026 [Certificate of State Sponsored Overseas Study] [Study Plan ].
My Personal Skills Include:
- Mechanical Modeling (Fusion360, Solidworks, Machining, Assembly, etc.)
- PCB Design (EasyEDA, Component Selection, Soldering and Testing, etc.)
- Embedded Development (Keil v5 + STM32CubeMX, Standard Library and HAL Library)
- ROS (Rviz, Gazebo, Mujoco)
- Physics and Mechanical Simulation (Matlab, ADAMS, Unity)
- Large Model Deployment and Fine-tuning (Scene Adaptation and Model Invocation)
- UI Design and Mini-programs (Matlab, WeChat)
- Web Development and Production (HTML, CSS, JavaScript)
- Video Editing (CapCut, Photoshop)
Languages I Speak:
- English Proficiency (CET-4/6)
- IELTS (Preparing, expected test in April 2026)
- Programming: C, Python, C++, Matlab, C#
🎓 Core Courses
- Automatic Control Theory, Micro-circuit Design, Human Factors Engineering, Mathematical Integrated Design, Linear Algebra, Probability and Mathematical Statistics, Engineering Principles, Engineering Design, Quantitative Engineering Design Methods, Robotics Fundamentals, Nature and Design, Product Design, Programming, Personalized Practice
Personalized Practice:
- Fall 2025 (2025.9~2026.2) [Report] [Defense]
- Spring 2025 (2025.2~2025.6) [Report] [Defense]
- Fall 2024 (2024.9~2025.1) [Report] [Defense]
- Spring 2024 (2024.2~2024.6) [Report] [Defense]
🏅 Awards and Honors
Competition Awards
- 2025.10 China Robot Competition ROBOCUP Agricultural Irrigation Group National Finals
National First Prize - 2024.02 2024 National University Robot Competition ROBOCON
National Third Prize - 2025.10 China Robot Competition ROBOCUP Tourism Treasure Hunt Group National Finals
National Third Prize - 2025.10 China Robot Competition ROBOCUP Tourism Adventure Group National Finals
National Third Prize - 2025.03 2025 Robomaster Mech Combat Robot Competition Southwest Regional Division
National First Prize - 2025.03 2025 Robomaster Alliance 3V3 Combat
Provincial Third Prize - 2025.07 2025 China Robot Competition Chongqing Regional Agricultural Irrigation Group
Provincial Champion - 2025.07 2025 China Robot Competition Chongqing Regional Tourism Adventure Group
Provincial Champion - 2025.07 2025 China Robot Competition Chongqing Regional Tourism Treasure Hunt Group
Provincial Champion - 2025.08 2025 “TI Cup” National University Student Electronic Design Competition Chongqing Division
Provincial First Prize - 2025.01 2025 American College Student Mathematical Modeling Competition
Meritorious Winner - 2024.11 2024 Chongqing University Student Engineering Practice and Innovation Ability Competition Smart Rescue
Provincial Second Prize - 2025.08 2025 China Robot Competition Special Events Drone Challenge
Provincial Third Prize - 2024.11 2024 Chongqing University Student Innovation Method (TRIZ) Competition
Provincial Third Prize - 2024.11 2024 Chinese University Student Information Literacy Competition Chongqing Division
Provincial Excellence Award - 2024.10 2024 Chongqing University VEX Robot Competition
School First Prize - 2024.11 2024 Chongqing University Physics Academic Competition (CUPT)
School First Prize - 2025.05 2025 Chongqing University Intelligent Car Competition Miniature Electromagnetic Group
School Second Prize - …
Student Leadership Awards
- 2025.11 Chongqing University
Excellent Student - 2025.07 Chongqing University
Outstanding Teaching Assistant Award - 2025.03 Chongqing University Excellent Student Comprehensive Quality Evaluation
Second-class Scholarship - 2025.09 Chongqing University Excellent Student Comprehensive Quality Evaluation
Second-class Scholarship - 2026.03 Chongqing University Excellent Student Comprehensive Quality Evaluation
First-class Scholarship - …
Other Awards
- 2026.01 Chongqing University 2025 Second Batch University Student Entrepreneurship Training Project -
National Excellent Completion - 2024.06 University Student Scientific Research Training Program (SRTP) -
Good Completion - 2025.07 Shenzhen Innovation Academy -
Star Teaching Assistant - 2024.01 Ningbo XPotPark Smart Research Institute Winter Camp -
Excellent Camper - …
📝 Publications and Patents
Papers
English
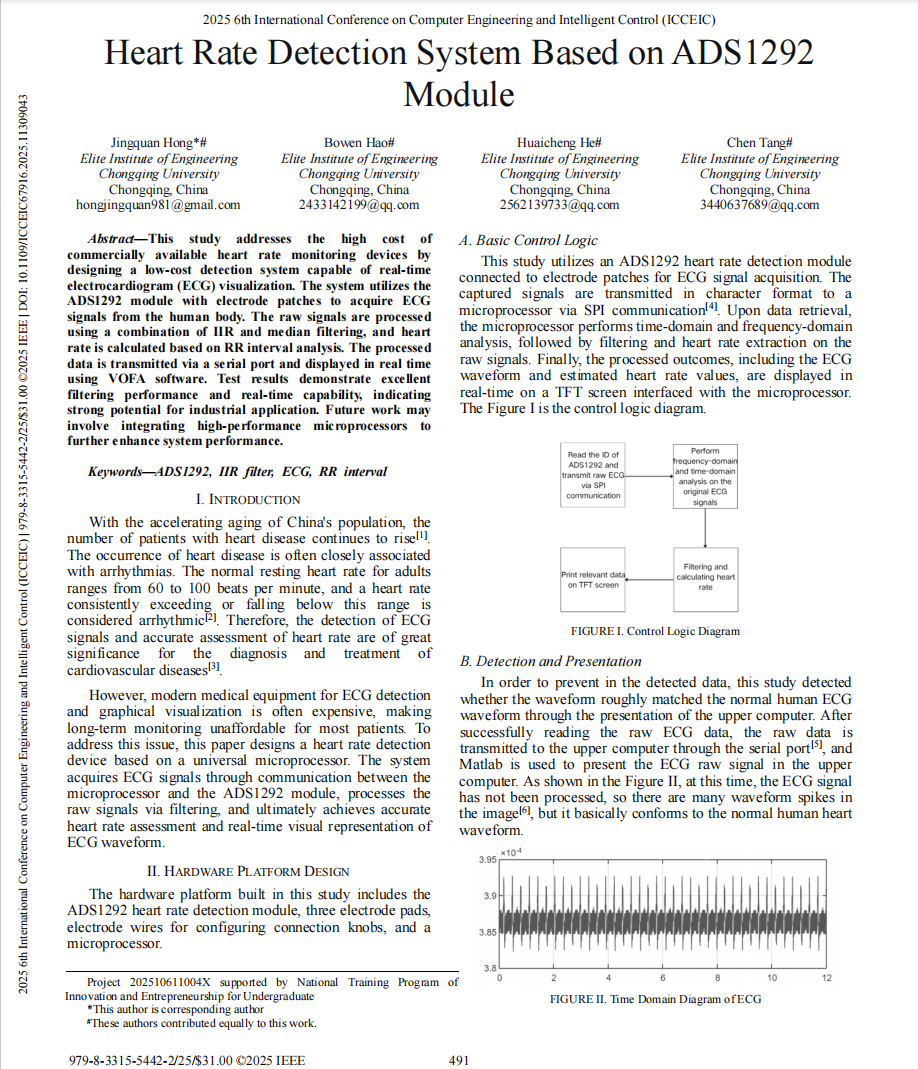
- Jingquan Hong,
Bowen Hao, Huaicheng He, Chen Tang. Heart Rate Detection System Based on ADS1292 Module. 2025 6th International Conference on Computer Engineering and Intelligent Control (ICCEIC), 2025. DOI: 10.1109/ICCEIC67916.2025.11309043. [Link] [Download]
Patents
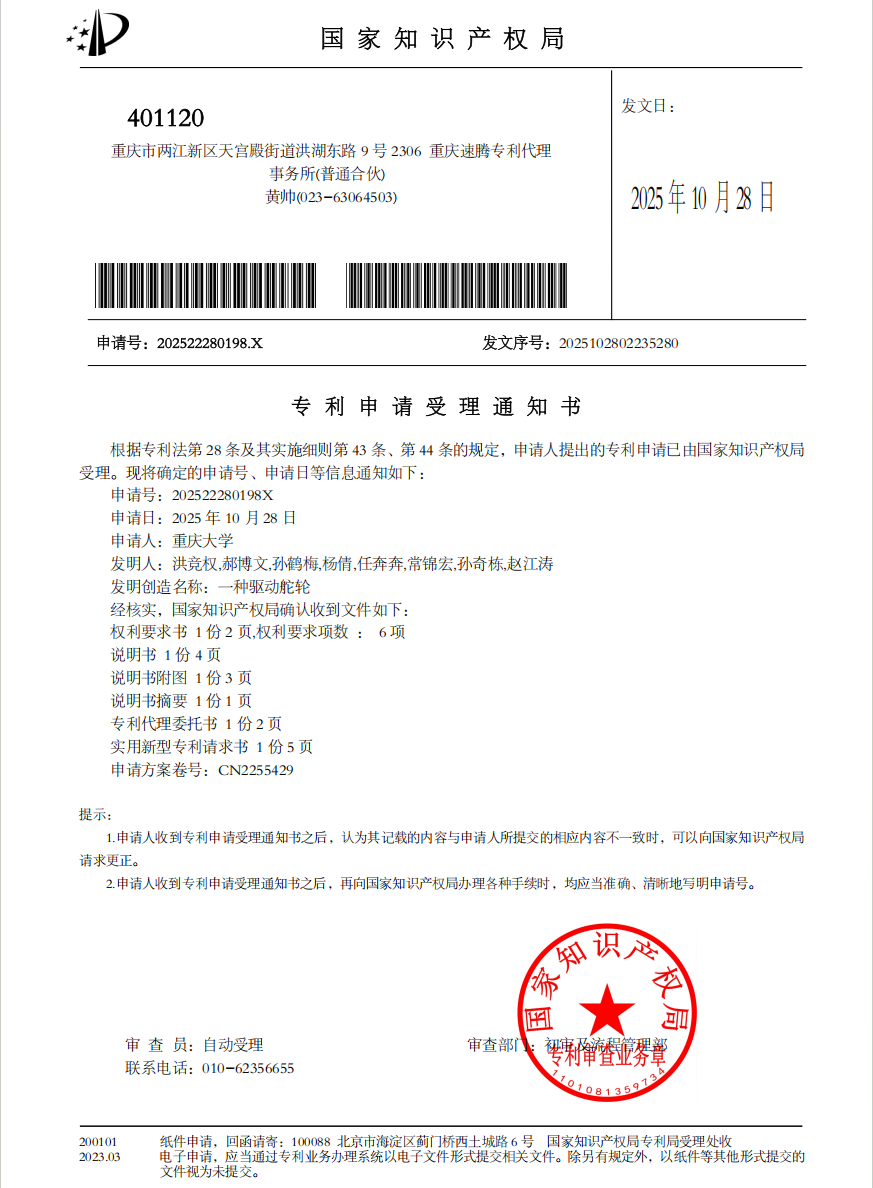
- Jingquan Hong,
Bowen Hao, Hemei Sun, Qian Yang, Benben Ren, Jinhong Chang, Qidong Sun, Jiangtao Zhao. A Driving Steering Wheel. [Acceptance Notice] [Application Document]
💻 Work and Internship Experience
- 2025.09.01 - 2025.12.01, Xbotics Embodied Intelligence Community, Hangzhou [Internship Certificate] [Community Official Website]
- 2025.07.01 - 2025.07.30, Shenzhen Innovation Academy, Shenzhen [Internship Certificate]
- 2024.10.01 - 2025.01.20, Chongqing Chenzhiyue Technology Co., Ltd. (Mingyuehu International Smart Industrial Innovation Base), Chongqing [Internship Certificate] [Product Introduction] [Product Link]
![[Internship Certificate]](recources/practise/XBotics%e5%ae%9e%e4%b9%a0%e8%af%81%e6%98%8e.jpg){kind=link}
💡 Projects
🤖 China Robot Competition Agricultural Group - Agricultural Irrigation Robot
Project Overview: Agricultural robot system with autonomous navigation system and precision irrigation structure
Main Responsibilities:
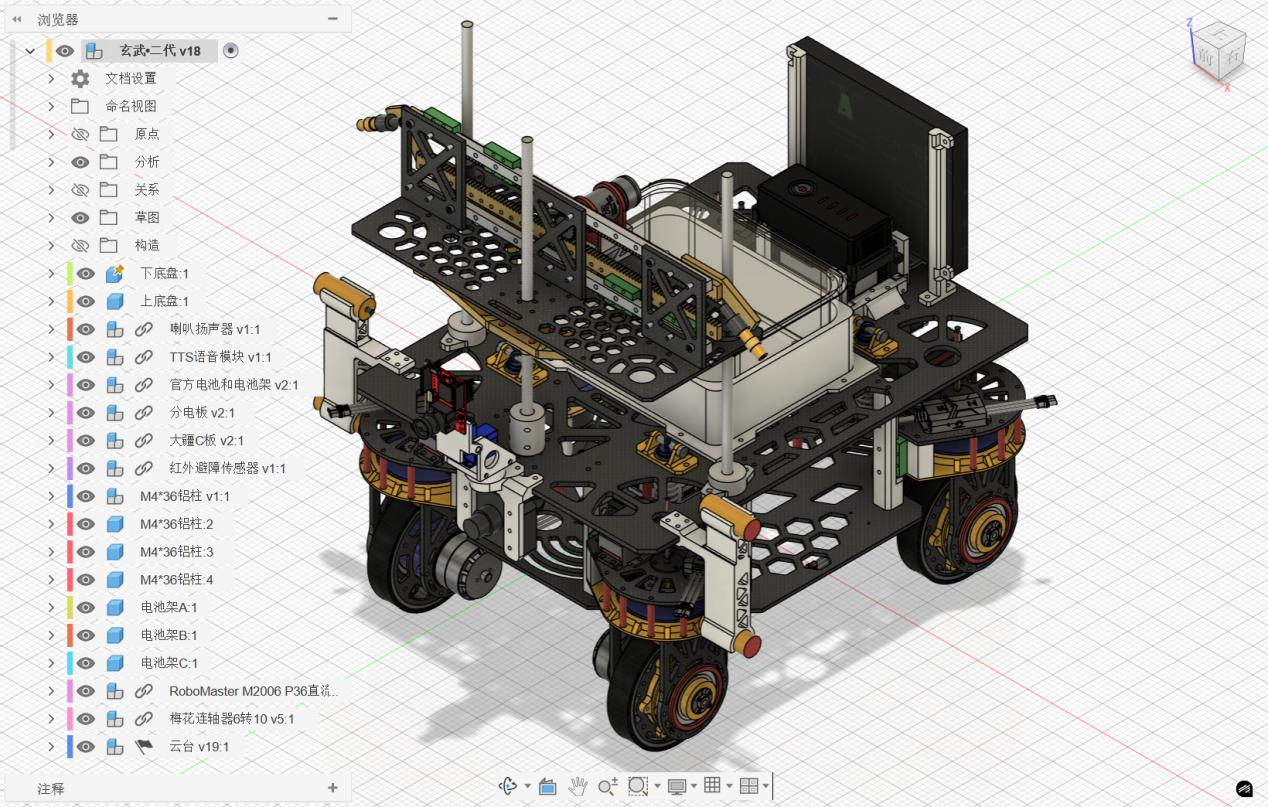
- Mechanical Design:Independently developed the mechanical structure design and 3D modeling of the steering wheel chassis for agricultural robots
- Transmission Mechanism: Designed a cloud platform with ball screws and rack-pinion mechanisms for three-degree-of-freedom spray head extension
- Control System: Integrated vision sensors, display screens, and voice modules for precise irrigation and information broadcast
Project Results:
- 2025 China Robot Competition ROBOCUP Agricultural Irrigation Group National Finals -
First Prize[Certificate] - 2025 China Robot Competition Chongqing Regional Agricultural Irrigation Group -
Provincial Champion[Certificate] - Filed a patent application based on steering wheel design
Related Materials: [Regional Competition Technical Document] [National Competition Technical Document]
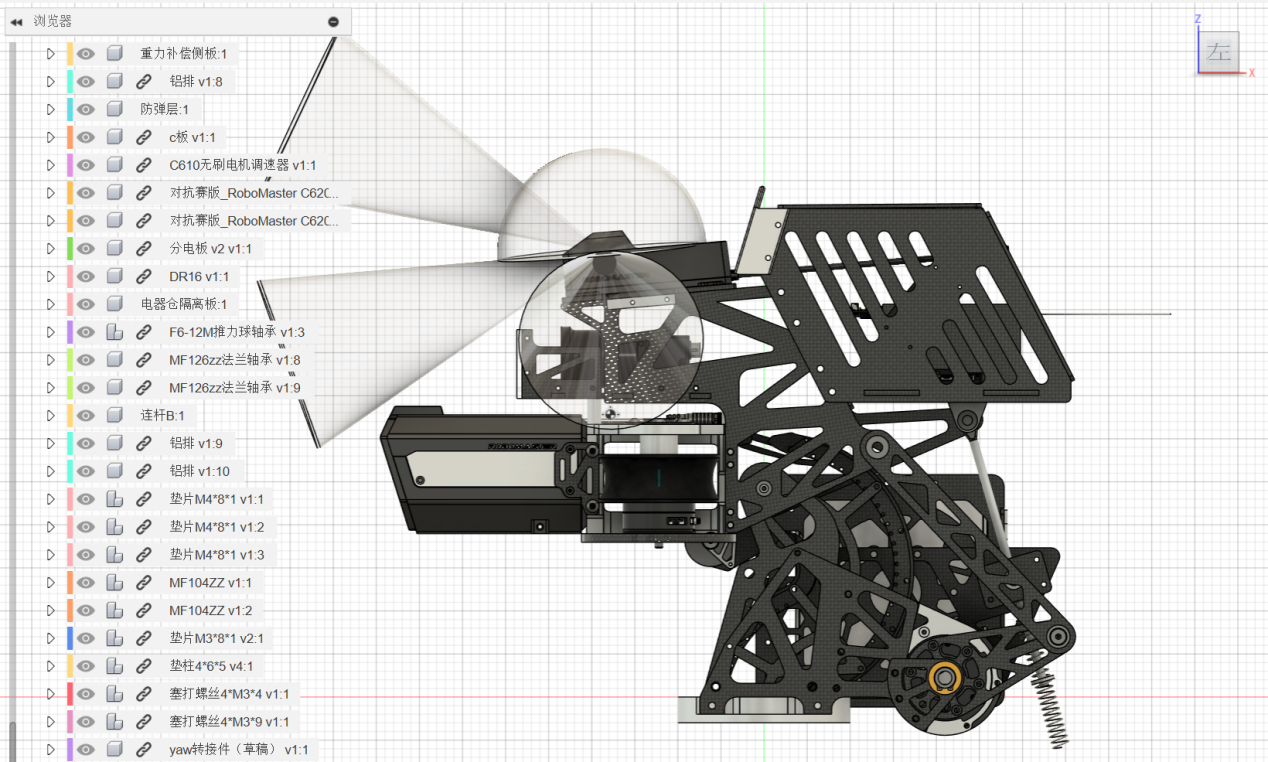
🤖 Chongqing University Robomaster Team - Hero Robot Structural Design
Project Overview: As the leader of the Hero Team, I designed the chassis, gimbal and test ammunition compartment for the 2025 Hero Robot
Main Responsibilities:
- Testing Framework: Designed synchronous belt Yaw axis, ammunition magazine, and testing framework for infantry robot launching mechanism
- Hero Chassis: Designed the hero robot chassis that meets the climbing and stair‑ascending requirements for the 2025 season
- Linkage Turret: Designed linkage-driven turret with Yaw and Pitch axes for hero robot
Project Results:
- 2025.03 2025 Robomaster Mech Combat Robot Competition Southwest Regional Division -
First Prize[Certificate] - 2025.03 2025 Robomaster Alliance 3V3 Combat Competition -
Third Prize[Certificate]
![[Certificate]](recources/project/RM/RMUL+2025%e6%9c%ba%e5%99%a8%e4%ba%ba%e7%ab%9e%e6%8a%80%e5%a5%96-3V3%e5%af%b9%e6%8a%97%e8%b5%9b_631.png){kind=link}
Related Materials: [Pole Crawler Chassis] [Alliance Competition Hero Turret] [2.5 Friction Hero Chassis Optimization]
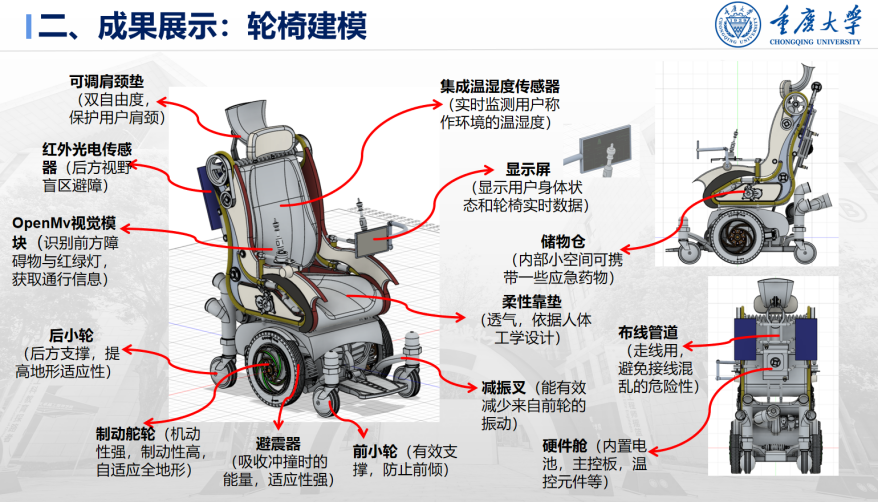
🦼 National (Municipal) Level University Student Entrepreneurship Training Project - Multimodal Intelligent Wheelchair Robot
Project Overview: A wheelchair robot with both environmental perception capability and health monitoring system
Main Responsibilities:
- Embedded Development: Designed user cardiac monitoring system using Zhengdian Atom Explorer and ADS1292 module
- Vision Monitoring System: Designed environment monitoring and broadcast system using OpenMV vision module and DY_SV8F voice module
- Mechanical Design: Independently designed overall mechanical structure and local modules for wheelchair robot
Project Results:
- Received Chongqing University 2025 Second Batch University Student Entrepreneurship Training Project -
National Excellent Completion[Certificate] - Published ICCEIC conference paper on “Heart Rate Detection System Based on ADS1292 Module” [Link] [Download]
![[Certificate]](recources/project/wheelchair/certificate.jpg){kind=link}
Related Materials: [Final Defense] [Final Report]
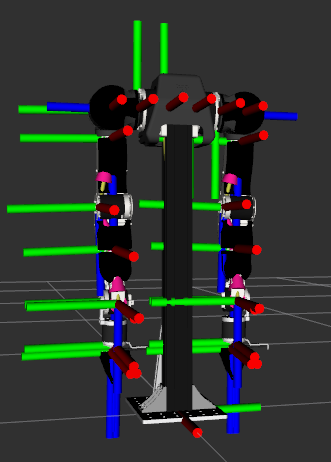
🦾 Chongqing University Embodied Intelligence Laboratory - Seven DOF Robotic Arm Kinematics
Project Overview: Kinematics Calculation and Trajectory Planning Based on OpenArm Manipulator
Main Responsibilities:
- Kinematics Algorithm: Purification and Reconstruction of the KDL Robotic Arm Kinematics Library and Decomposition and Optimization of Core Algorithms
- Hardware-in-Loop Simulation: The self-developed kinematics library is used to realize direct control of the Rviz virtual manipulator by STM32
-
Kinematics Library Performance Testing:
①Used Matlab to fit target trajectory and actual end-effector trajectory to verify kinematic solving accuracy;
②Used STM32F407 timer to record single solving time to determine computational efficiency
Project Results:
- Ongoing laboratory project
Related Materials: [Technical Document] [Defense]
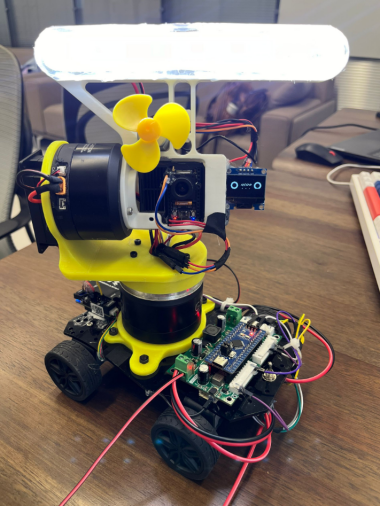
🛋️ Automatic Control Principles - Multimodal Desk Pet Lamp
Project Overview: Multifunctional Desk Lamp Pet with Integrated Vision, Audition and Emotional Interaction
Main Responsibilities:
- Embedded Development: State machine programming for voice and vision modules with desk pet expression; Closed-loop PID control algorithm for LED strip
- Vision Development: Used Maixcam for self-learning tracking, gesture recognition, and emotion recognition development and application
- Mechanical Design: Independently designed dual-DOF turret based on DJI GM6020 gimbal motor and complete model
Project Results:
- 2025 “TI Cup” National University Student Electronic Design Competition Chongqing Division -
First Prize[Certificate]
![[Certificate]](recources/project/lamp/%e7%94%b5%e8%b5%9b%e8%af%81%e4%b9%a6.jpg){kind=link}
Related Materials: [PPT] [Technical Report] [Video]
🚗 University Student Engineering Practice and Innovation Ability Competition - Intelligent Rescue Robot
Project Overview: An intelligent rescue robot car with dual automatic/manual modes designed under multiple rule constraints
Main Responsibilities:
- Mechanical Design: Through four iterations, designed dual-wheel differential drive, tri-omnidirectional wheel, and quad-omnidirectional wheel chassis with gripper structure
- Vision Algorithm: Algorithm Development for Target Rescue Object Recognition and Tracking Based on Maixcam Vision Sensor
- Poster Design: Used Photoshop for poster design and production
Project Results:
- 2024 Chongqing University Student Engineering Practice and Innovation Ability Competition Intelligent Rescue -
Second Prize[Certificate] - 2024 Chongqing University Engineering Practice and Innovation Ability Competition School Finals Intelligent Rescue -
Silver Prize[Certificate]
Related Materials: [Technical Document] [Poster]
![[Poster]](recources/project/engineer/%e6%99%ba%e8%83%bd%e6%95%91%e6%8f%b4%e6%b5%b7%e6%8a%a5.jpg){kind=link}

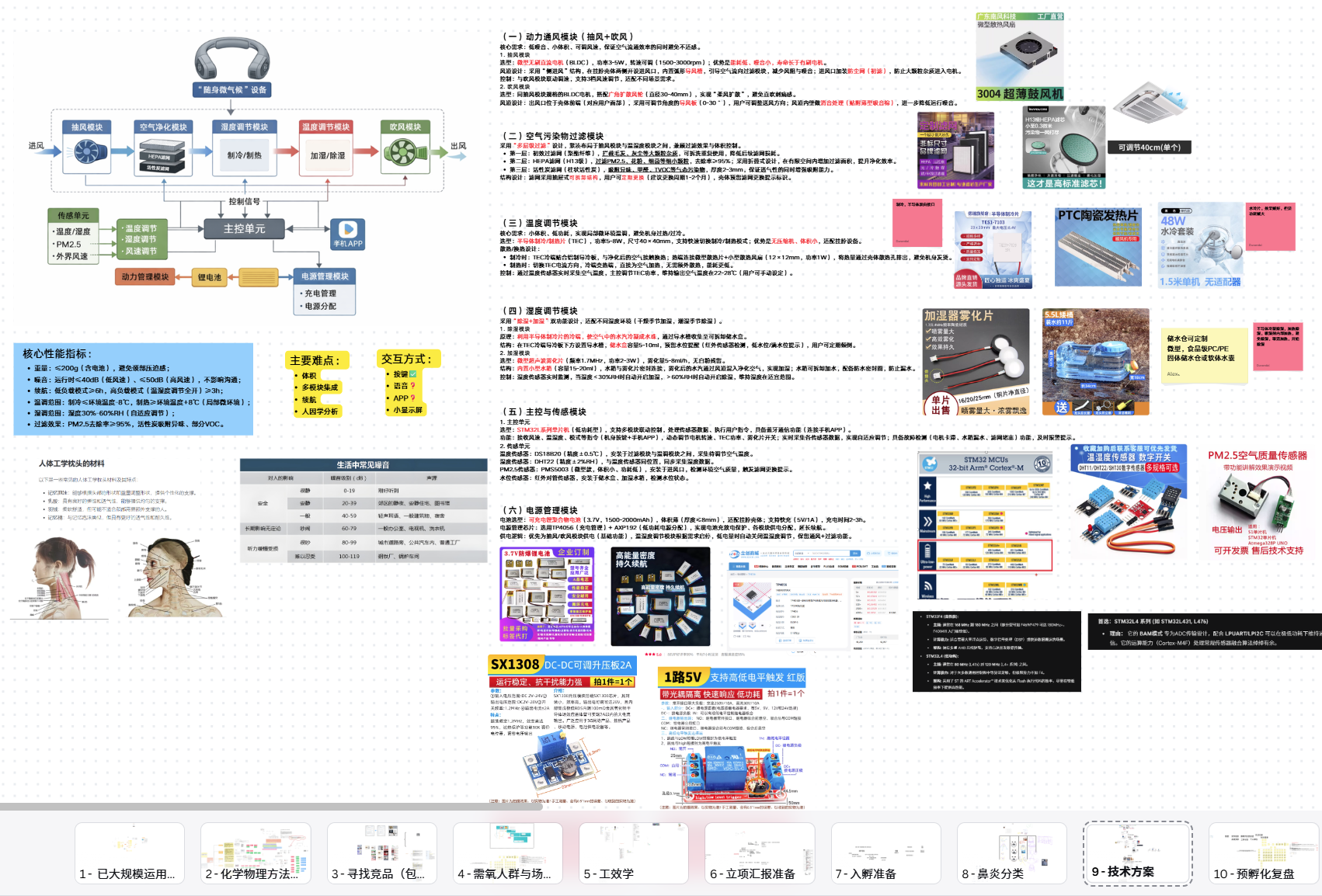
🎯 “Changpao Breathing” Team Project - Mingyuehu Innovation Base Entrepreneurship Project
Project Overview: As a core member, developed a hardware device for running enthusiasts that automatically adjusts air quality
Main Responsibilities:
- Market Research: Conducted extensive desktop research and user interviews to identify pain points, established user personas
- Prototype Development: Determined technical roadmap for prototype, conducted component selection and PCB design
- Large Model Development:Deploy a localized lightweight large model for the prototype to achieve environmental perception and data understanding
Project Results:
- Team passed RMB 100,000 staged funding approval from Mingyuehu Innovation Base, currently in RMB 500,000 exploration phase
🎯 Ningbo XPotPark Smart Research Institute Winter Camp - Product Design Project
Project Overview: As a core member, developed a mouth-held electric ultrasonic toothbrush.
Main Responsibilities:
- Market research and project defense
- Product design and 3D modeling, prototype development and iteration
- Research report writing, PPT creation, presentation
- Video editing and poster design
Project Results:
- 2024 Ningbo XPotPark Smart Research Institute Winter Camp -
Excellent Camper[Certificate]
![[Certificate]](recources/project/toothbrush/%e5%ae%81%e6%b3%a2%e5%86%ac%e4%bb%a4%e8%90%a5%e8%af%81%e4%b9%a6.jpg){kind=link}
Related Materials: [Presentation 1] [Presentation 2] [Display Board]
![[Display Board]](recources/project/toothbrush/%e5%b1%95%e6%9d%bf.jpg){kind=link}

⚙️ Robot Vacuum Redesign and Upgrade - Micro-circuit Design Course Project
Project Overview: A multifunctional sweeping robot with autonomous mapping and path planning, realized through the overall redesign and function expansion of the Haier TL30UI
Main Responsibilities:
- Component Selection: Component and sensor selection testing based on robot vacuum functional requirements
- Circuit Design: Schematic diagram design and PCB layout using EasyEDA for robot vacuum electronic board
- Navigation Algorithm: Implemented global mapping and path planning for robot vacuum using N10 lidar with Raspberry Pi 5
Related Materials: [PPT] [Technical Document] [Video]

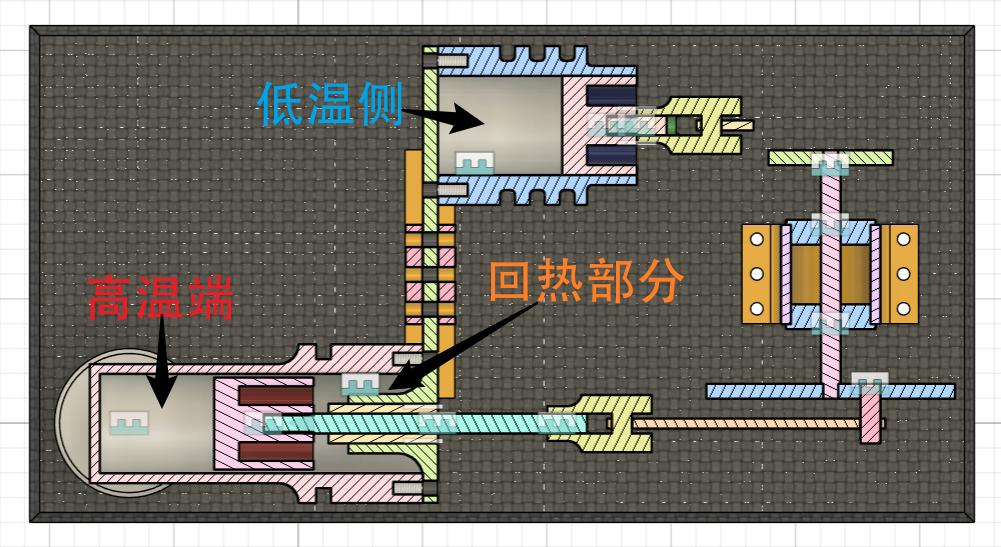
⚙️ Stirling Engine Design and Manufacturing - Engineering Design Project
Project Overview: Complete Design and Simulation of a γ-Type Stirling Engine Implemented from 0 to 1
Main Responsibilities:
- Structural Design: Responsible for mechanical structure design, fabrication, and machining, completed physical prototype
- Thermodynamic Analysis: Quantitative analysis of Stirling cycle inside cylinder, iterated design parameters
- Co-simulation: Co-simulation is carried out using Adams and Matlab Simulink to analyze the theoretical output power
Related Materials: [PPT] [Technical Document]